Sensors and navigation
Please help to review and edit this page or section. Information are subject to change.
Overview
The PinePhone contains various components that enable or aid orientation and navigation tasks.
- Multi-GNSS Receiver as part of the cellular modem (GPS/Galileo/GLONASS/BeiDou)
- IMU (Inertial Measurement Unit), combined Accelerometer and Gyroscope sensor (MPU6050)
- Magnetometer (LIS3MDL or AF8133J)
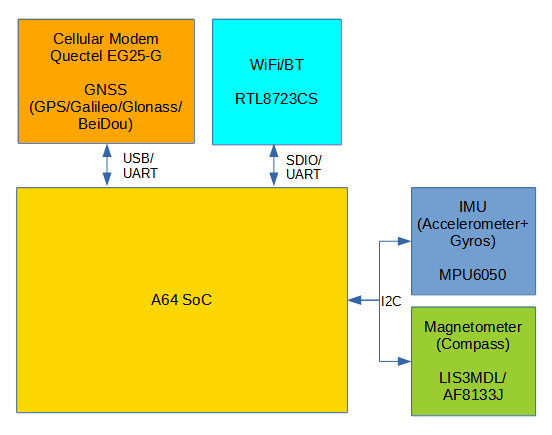
PinePhone navigation sensors
Hardware
Quectel EG25G Modem / GNSS Receiver
Invensense/TDK MPU6050 IMU
Key features:
- Digital-output X-, Y-, and Z-Axis angular rate sensors (gyroscopes) with selectable range of ±250, ±500, ±1000, and ±2000°/sec
- Digital-output triple-axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g
- 400 kHz Fast Mode I2C for communicating with all registers
ST LIS3MDL Magnetometer/Compass
Key features:
- ±4/±8/±12/±16 gauss selectable magnetic full scale range
- 16-bit data output
- …
VTC AF8133J Magnetometer/Compass
Key features:
- ±12/±22 gauss selectable magnetic full scale range
- 400Hz max. update rate
- 16-bit data output
Sensor reference frames
The sensors are mounted on the PinePhone’s mainboard in different positions and orientations. For the purpose of orientation and navigation it is important to know the relationship between the sensor coordinate frames and the body frame of the phone.
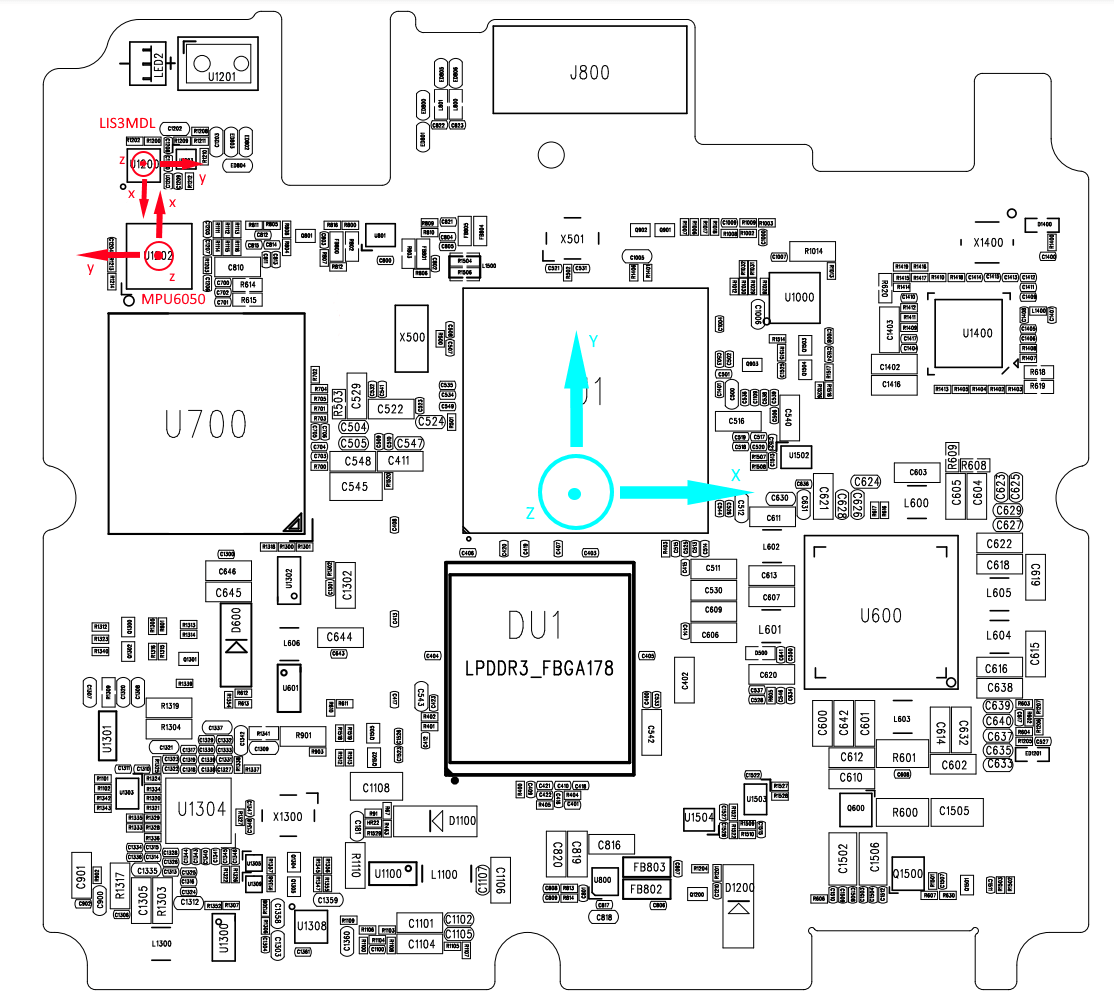
PinePhone sensor coordinates systems (red) and body coordinate system (cyan)
As a basis for software development, a common body coordinate system has to be established along with it’s relation to a world coordinate system. “iio-sensor-proxy expects the (sensor) readings to match those defined in the Linux IIO documentation, the Windows Integrating Motion and Orientation Sensors whitepaper, and the Android sensor documentation”[ref]. To transform the sensor coordinate systems into body coordinates, ‘mount matrices’ have to be defined.
TODO: explain body reference choices, north-east-down world coordinates
Software
Drivers
TODO: i2cdev, linux-iio, support matrix
- EG25G: provides either UART or USB based interfaces for NMEA data
- /dev/ttyUSB2: AT command interface
- /dev/ttyUSB1: default NMEA data output
- MPU6050:inv_mpu6050, inv_mpu6050_i2c, industrialio
iio:device2: mpu6050 (buffer capable)
9 channels found:
accel_x: (input, index: 0, format: be:S16/16>>0)
6 channel-specific attributes found:
attr 0: calibbias value: -2102
attr 1: matrix value: 0, 0, 0; 0, 0, 0; 0, 0, 0
attr 2: mount_matrix value: 0, 1, 0; -1, 0, 0; 0, 0, -1
attr 3: raw value: 912
attr 4: scale value: 0.000598
attr 5: scale_available value: 0.000598 0.001196 0.002392 0.004785
accel_y: (input, index: 1, format: be:S16/16>>0)
6 channel-specific attributes found:
attr 0: calibbias value: 941
attr 1: matrix value: 0, 0, 0; 0, 0, 0; 0, 0, 0
attr 2: mount_matrix value: 0, 1, 0; -1, 0, 0; 0, 0, -1
attr 3: raw value: 516
attr 4: scale value: 0.000598
attr 5: scale_available value: 0.000598 0.001196 0.002392 0.004785
accel_z: (input, index: 2, format: be:S16/16>>0)
6 channel-specific attributes found:
attr 0: calibbias value: 1242
attr 1: matrix value: 0, 0, 0; 0, 0, 0; 0, 0, 0
attr 2: mount_matrix value: 0, 1, 0; -1, 0, 0; 0, 0, -1
attr 3: raw value: 15860
attr 4: scale value: 0.000598
attr 5: scale_available value: 0.000598 0.001196 0.002392 0.004785
temp: (input)
3 channel-specific attributes found:
attr 0: offset value: 12420
attr 1: raw value: -1073
attr 2: scale value: 2.941176
anglvel_x: (input, index: 4, format: be:S16/16>>0)
5 channel-specific attributes found:
attr 0: calibbias value: 0
attr 1: mount_matrix value: 0, 1, 0; -1, 0, 0; 0, 0, -1
attr 2: raw value: -32
attr 3: scale value: 0.001064724
attr 4: scale_available value: 0.000133090 0.000266181 0.000532362 0.001064724
anglvel_y: (input, index: 5, format: be:S16/16>>0)
5 channel-specific attributes found:
attr 0: calibbias value: 0
attr 1: mount_matrix value: 0, 1, 0; -1, 0, 0; 0, 0, -1
attr 2: raw value: 4
attr 3: scale value: 0.001064724
attr 4: scale_available value: 0.000133090 0.000266181 0.000532362 0.001064724
anglvel_z: (input, index: 6, format: be:S16/16>>0)
5 channel-specific attributes found:
attr 0: calibbias value: 0
attr 1: mount_matrix value: 0, 1, 0; -1, 0, 0; 0, 0, -1
attr 2: raw value: 0
attr 3: scale value: 0.001064724
attr 4: scale_available value: 0.000133090 0.000266181 0.000532362 0.001064724
timestamp: (input, index: 7, format: le:S64/64>>0)
gyro: (input, WARN:iio_channel_get_type()=UNKNOWN)
1 channel-specific attributes found:
attr 0: matrix value: 0, 0, 0; 0, 0, 0; 0, 0, 0
3 device-specific attributes found:
attr 0: current_timestamp_clock value: realtime
attr 1: sampling_frequency value: 50
attr 2: sampling_frequency_available value: 10 20 50 100 200 500
2 buffer-specific attributes found:
attr 0: data_available value: 0
attr 1: watermark value: 1
Current trigger: trigger1(mpu6050-dev2)
- LIS3MDL: st_sensors, st_sensors_i2c, st_magn, st_magn_i2c, industrialio
iio:device1: lis3mdl (buffer capable)
4 channels found:
magn_x: (input, index: 0, format: le:S16/16>>0)
3 channel-specific attributes found:
attr 0: raw value: 6766
attr 1: scale value: 0.000146
attr 2: scale_available value: 0.000146 0.000292 0.000438 0.000584
magn_y: (input, index: 1, format: le:S16/16>>0)
3 channel-specific attributes found:
attr 0: raw value: -2046
attr 1: scale value: 0.000146
attr 2: scale_available value: 0.000146 0.000292 0.000438 0.000584
magn_z: (input, index: 2, format: le:S16/16>>0)
3 channel-specific attributes found:
attr 0: raw value: 12726
attr 1: scale value: 0.000146
attr 2: scale_available value: 0.000146 0.000292 0.000438 0.000584
timestamp: (input, index: 3, format: le:S64/64>>0)
3 device-specific attributes found:
attr 0: current_timestamp_clock value: realtime
attr 1: sampling_frequency value: 1
attr 2: sampling_frequency_available value: 1 2 3 5 10 20 40 80
2 buffer-specific attributes found:
attr 0: data_available value: 0
attr 1: watermark value: 1
Current trigger: trigger0(lis3mdl-trigger)
Userspace services
TODO: …
- Modem Manager
- ofono
- gpsd
- iio-sensor-proxy
- geoclue
Tools/Utilities
TODO: minicom, gpsmon, monitor-sensor, iio-utils…
Applications
TODO: pure-maps, navit, …
Development
TODO: Open issues, tasks, projects
Open issues
- AGPS integration
- how to enable/disable the service?
- update triggers?
- network connectivity?
- agps data valid?
- Raw magnetometer handling
- Issue: Support polling/non-compensated magnetometers in iio-sensor-proxy
- Issue: raw magnetometer calibration implementation
- GPS/Compass App
- TODO: specification
Frameworks/APIs/…
- Modem Manager location API
- oFono location API (experimental?)
- geoclue API

